https://docs.redshift3d.com/display/RSDOCS
Cameras(摄像机)
Lights(灯光)
Shader(着色器节点)
Material Shaders(材质)
Textures Shaders(纹理)
Color
This tab allows you to control how the internally computed noise is turned into color for output.
这个标签允许你控制内部计算的噪波如何转换为输出颜色。
Noise
This tab allows you to control how the noise is generated.
这个标签允许你控制噪波的生成。
General(通用)
- Noise Type(噪波类型)
- Fractal(分形)
- Turbulence(湍流)
- Cell(蜂窝)
Fractal/Turbulence(分形/湍流)
- Complexity(复杂)
- Amplitude Gain(振幅增益)有点像羽化
- Frequency Scale(频率缩放)就是缩放
- Distortion(失真)好像是扭曲又好像移动
- Distortion Scale(失真缩放)
Time
Source(源)
Allows you to control how the noise is affected over time. The options are as follows:
- None - 不考虑时间计算
- Constant(常量) - 当前帧时间来计算
- User - 用户定义的时间来计算
Constant
这是应用于当前帧时间的比例。仅在Source设置为“常量”时适用
Consant Scale
This is a scale that is applied to the current frame time. Only applicable when Source is set to ‘Constant’.
User Time
This is the user-defined time value. Only applicable when Source is set to ‘User’.
Color
Color Layer
Volume Topics
Volumetric Scattering And Fog(体积光和雾)
渲染设置
基本
Min/Max Samples(最小/最大 采样)
这个选项是每个像素采集主光线的最小和最大数量。
Redshift 最开始将每个像素点“最小采样”采集光线,然后,如果它仍然检测到该像素周围的噪点,他将继续采集更多的光线,知道像素足够干净,或者达到“最大采样”采集光线。
如果你正在使用景深或者运动模糊,我们建议至少使用8-16的“最小采样”。
包含大景深或者长运动模糊的场景,可能需要非常高的“最大采用”,例如说256或更高。
Adaptive Error Threshold(自适应误差阈值)
这个选项控制了检测噪点算法的识别度。数字越小检测噪点早点的频率越高,这意味着每像素点将采集更多的光线,反之亦然。建议你使用“显示示例”功能可视化设置效果。默认值0.01适用于大多数场景。对于产生的质量结果,我们建议使用较低的设置,如0.003。
Show Samples(显示采样)
这个选项启用调试渲染模式,该显示模式按每个像素点的采集光线数量以灰度的形式呈现。
较暗的像素点表示采集的光线数量较少,而较亮的像素点表示采集的光线数量比较多。
纯白色意味着该像素点用的是“最大采样”来采集光线。
启用渲染模式的时候,图像的嘈杂部分通常会变得更亮,因为统一采样器将采集更多光线来尝试去除噪点。
Don’t automatically reduce samples of other effects(不自动减少其他效果的采样)
该选项更详细的描述。我们不建议使用此选项。Redshift仅为了来自其他渲染器的用户的利益而包含它。将来可能不推荐使用此选项。
Randomize Pattern On Each Frame(每帧上的随机化模式)
这个选项做动画务必勾上,否则噪点不动,画面在动。
当景深,运动模糊,暴力GI,光泽反射/折射,AO和区域光照明等共用一个共同的采样模式,在默认情况下,在 Redshift 中,每帧一致。当这些效果的采样次数不够高且噪点可见时,在渲染动画时,噪点可能会在相机上卡住。这可能在视觉上分散注意力。启用“每帧上的随机化模式”会使每个帧上的噪点模式随机化,这使得噪点看起来更像移动电视静态或胶片颗粒。在某些情况下,这可能更具有视觉吸引力。
Sample Filtering(采样过滤器)
Filter Type(过滤类型)
Filter Size(过滤大小)
Max Subsample Intensity(最大子采样强度)
Max Secondary Ray Intensity(最大二次射线强度)
Sampling Overrides(采样覆写)
采样覆写 顾名思义,就是把单独的设置的采样统一重写,无需一个一个单独去改。
Motion Blur(运动模糊)
Enable Deformation Blur(启用变形模糊)
Deformation blur (tracking the motion of vertices) can be memory-intensive especially for high-poly or displaced geometry. For this reason, it has a separate switch to enable/disable. If most of your scene’s motion is due to rigid body animation or camera movement, you can leave this option disabled.
Transformation Steps(转型步幅)
这个数值越大,过渡约圆滑(如图所示)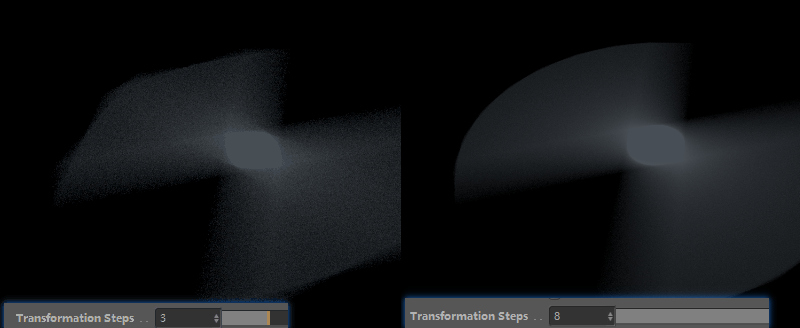
Frame Duration(帧持续时间)
这个参数和Oc的 Shutter[sec.](快门) 是一样的,越大越模糊
Shutter Position(快门位置)
这个参数和Oc的 Shutter alignment(快门对准)是一样的,就连选项都一样 这个翻译的有点抽象,其实也很好理解
| Shutter Position(Reshfit) | Shutter alignment(Octane) | 描述 |
|---|---|---|
| Center on Frame | Centered | 中 |
| Start on Frame | Before | 前 |
| End on Frame | After | 后 |
不过 Redshift 有一点好就是,可以用 Start on Frame 和 End on Frame 这两个参数控制开始和结束的多少
Photometric Units(光度单位)
Units to Meter Scale(单位到米刻度)
根据工程缩放来修改
cd/m^2 Factor
Quantization(量化)
Shutter Efficiency(快门效率)
这个参数最大值1,比较难解释(如图所示)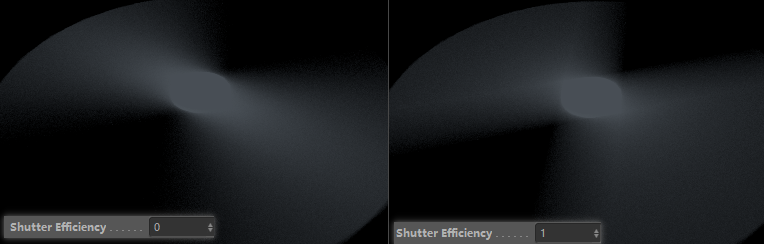
Denoise(降噪)
降噪功能只有在 Redshift 2.6 版本中!
AOV(任意输出变量)
AOV stands for “arbitrary output variables”
Optimization(优化)
GI(全局光照)
GI 全称 “Global Illumination”
- 66